六分力傳感器工作原理
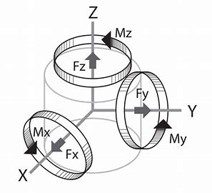
六分力傳感器彈性體采用專力結構,體積小,靈敏度高、剛性好、維間耦合小、有機械過載保護功能。應用于遙控機器人,機器人手術,機械手臂研究,手指力研究,精密裝配,自動磨削、輪廓跟蹤、雙手協調、零力示教等作業中,在航空、航天及機械加工,汽車等行業中有廣泛的應用。
一般消除耦合或者抑制耦合可以從兩個方向來做:第一種是在生產傳感器之前進行的工作,一般叫做結構解耦,即從傳感器的設計上來消除或者抑制耦合,該方法涉及到了傳感器的制造工藝問題,這個往往比較困難,并且可能會增加成本:第二種則是利用系統性的數學模型,要矩陣解耦,運用數字信號處理的方法來減少或者消除傳感器的維間耦合,該方法對制作工藝要求比較低,比較容易達到,而且還能取得很好的效果。



 3
3
立即詢價
您提交后,專屬客服將第一時間為您服務