
|

|

|

|
|

|
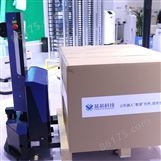
托盤自主無人叉車通過相機對行駛環境的特征進行觀測,構建出環境地圖,特征提取、數據關聯、校正更新。
托盤自主無人叉車通過相機對行駛環境的特征進行觀測,構建出環境地圖,特征提取、數據關聯、校正更新。相對于其他導航方式,視覺導航由于能從環境中提取語義信息,快速適應復雜場景,例如由于長時間使用變形的貨架、載具、超板貨物、短時間激增的任務量等。隨著CPU、GPU處理能力快速迭代,視覺SLAM在AGV領域得到了廣泛的應用。視覺SLAM的優勢是:精度高、智能化程度高、成本低、施工方便。另一方面,視覺技術對光的依賴度較高,在暗處或者一些無紋理區域需要增加補光或借助輔助傳感器。

托盤自主無人叉車技術參數:
產品型號 | LXSR-FL21500P |
導航方式 | 自然導航 |
外形尺寸L*D*H(mm) | 1620*880*1315 |
荷載中心距(mm) | 600mm |
自重(含電池) | 260kg |
操作方式 | 自動或手動 |
額定承載能力(kg) | 1500 |
叉臂舉升高度(mm) | 195 |
電池規格 | 磷酸鐵鋰 |
運行速度(空載)(m/s) | 1 |
提叉速度(空載/滿載m/s) | 0.037/0.03 |
降叉速度(空載/滿載m/s) | 0.043/0.05 |
導引定位精度(mm) | ±10 |
產品型號 | LXSR-FL21500P |
重復定位精度(mm) | ±10 |
小轉彎半徑(mm) | 1200 |
小轉彎通道寬度(mm) | 2300(托盤1200*1000) |
跨越間隙(mm) | 5 |
跨越高度(mm) | 5 |
額定工況續航時間(H) | 6(40Ah) |
避障 | 視覺和區域安全激光 |
碰撞條檢測 | 車頭半包圍碰撞條檢測 |
托盤檢測 | 具備 |
急停按鈕 | 左右急停按鈕 |
聲光報警 | 具備 |
室內/室外 | 室內 |
單張地圖 | ≤200000 m² |
工作溫度 | 0~40℃ |
工作濕度 | 10%-90%無凝露 |
工作坡度 | ≤2° |
空氣環境 | 無粉塵、易燃易爆、腐蝕性氣體 |
網絡通信 | WIFI/IEEE 82.11 a/b/g/n/ac |

|

|
|
|

|

|
|
|
*您想獲取產品的資料:
個人信息:


